Multidrone constellation changes
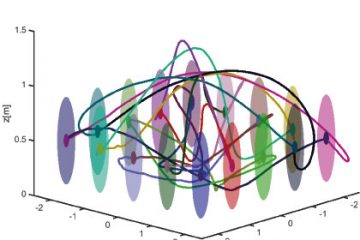
Planning the simultaneous movement of multiple agents represents a challenging coordination problem, and ideally safety and efficiency are jointly addressed. In his master thesis, Paul Ladinig developed a planning algorithm for fast and energy-efficient trajectories with reduced collision potential from a start to an end constellation. This new approach combines … Continue reading Multidrone constellation changes